Redundant Robot Kinematic Control with Hard Constraints
Real-time generalized SNS framework for task control of redundant robots under online variable hard constraints.
Outcome
I developed and validated a real-time generalized SNS framework for task control of redundant robots when hard inequality constraints are present in both joint and Cartesian spaces. The method handles online insertion, deletion, and variation of constraints while preserving feasibility and directional consistency of the primary task.

Problem
Redundant manipulators need to track Cartesian tasks without violating strict joint and workspace limits. In practice, these limits can change online due to safety rules, task phases, or environment interaction. The core challenge is to keep control feasible in real time while treating all joint and Cartesian inequality bounds as hard constraints.
System
- Formulation: inverse differential kinematics with generalized joint and Cartesian inequality constraints
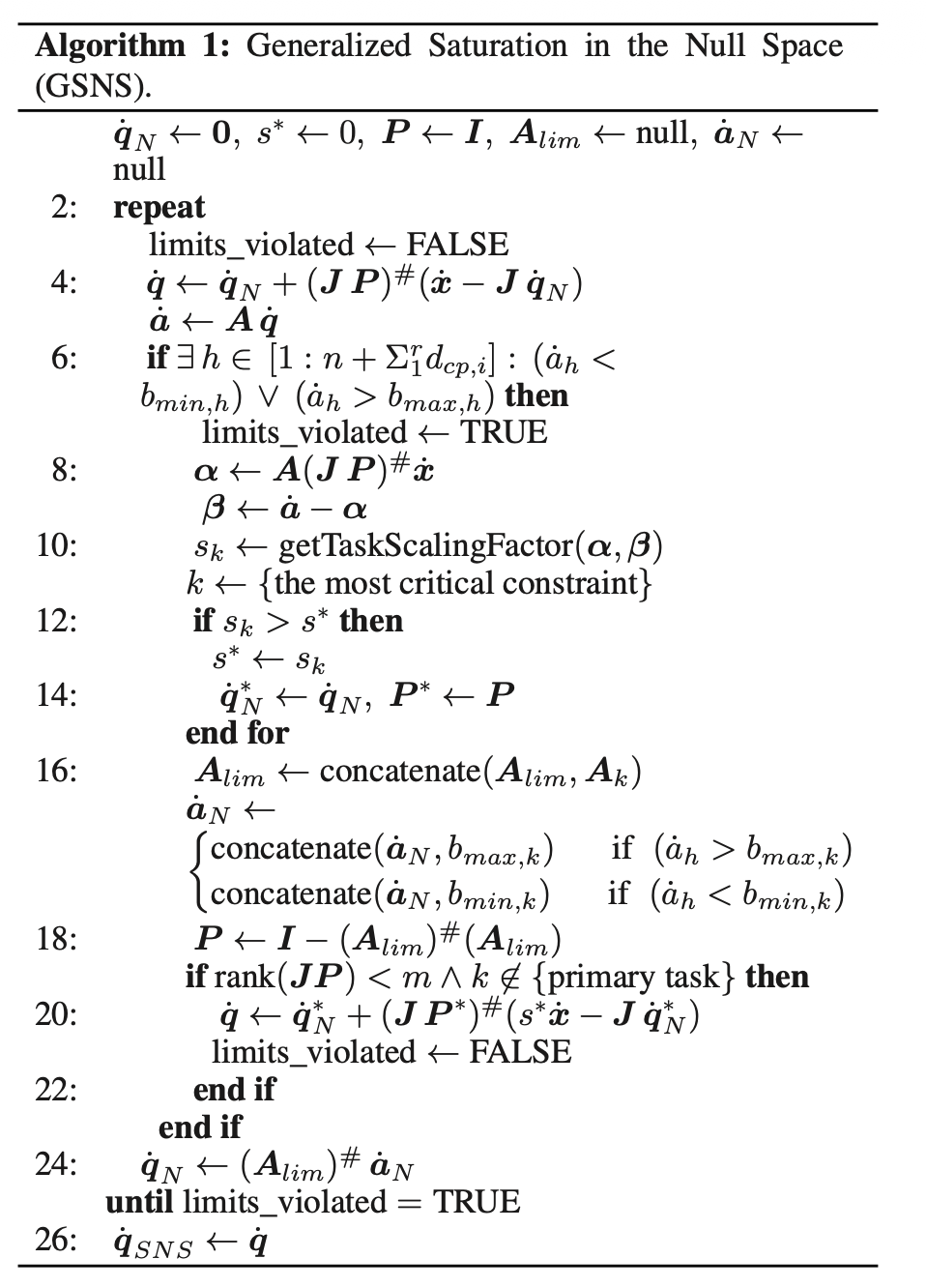
- Solver: generalized SNS loop that detects the most critical constraint, saturates it to its limit, and recomputes a feasible solution
- Constraint handling: online variation, insertion, and deletion of constraints without retuning
- Execution: real-time C++ implementation for hardware and MATLAB simulation benchmarking
- Validation platform: planar simulations and experiments on a 7R KUKA LWR IV robot
Contribution
- Formulated a command-level framework that treats joint and Cartesian inequalities uniformly as hard constraints
- Designed and implemented the generalized SNS saturation-and-projection algorithm
- Built the evaluation pipeline and ran simulation and hardware benchmarks
- Validated behavior under time-varying and inconsistent-constraint scenarios on redundant manipulators
Technical Stack
- Redundant robot inverse kinematics
- Hard inequality constraint handling in joint and Cartesian spaces
- Generalized SNS task scaling and active-constraint saturation
- Real-time C++ control implementation
- MATLAB/C++ benchmarking and hardware validation
Key Results
- Hard joint and Cartesian limits were respected during online activation/deactivation of constraints
- Stable task execution was maintained across feasible and inconsistent-constraint phases through online task scaling
- Experimental implementation on KUKA LWR achieved a mean execution time of 18 us, over one order of magnitude faster than the local QP baseline (qpOASES, reported at 283 us)
- Simulation benchmarks showed higher computational efficiency than qpOASES under matched constrained-control settings
- Published in IEEE Robotics and Automation Letters (2022) and presented at IROS (2022)

")
Media
Impact and Future Direction
This project provides a practical controller core for robots that must remain safe and feasible under changing kinematic limits. The same formulation is directly useful for collaborative manipulation, online workspace adaptation, and future extensions from velocity-level control toward acceleration- and dynamics-level constrained control.
Links
- Paper: IEEE RA-L 2022
- IEEE Xplore: Kinematic Control of Redundant Robots with Online Handling of Variable Generalized Hard Constraints
- Code: Generalized-SNS (GitHub)
Skills
redundant robot control hard-constraint handling real-time kinematics SNS C++ control hardware validation