Amirhossein Kazemipour
Robotics Engineer | Hardware, Electronics, and Control

I build robotic systems from actuator design to closed-loop control
I build musculoskeletal robotic systems inspired by nature, develop their driver electronics and PCB designs, and implement real-time control systems from classical control to learning-based methods on physical hardware.
My contributions have been published in IEEE RA-L, ICRA, Robosoft, IROS, Nature Communications, and Science Advances, with a focus on end-to-end execution from concept to on-hardware validation.
Focus Areas
- Hardware: actuator architecture, compliant mechanisms, fabrication workflows, and integration. Examples: Bio-inspired musculoskeletal antagonistic joint and Compliant Ratchet Muscle (under preparation).
- Electronics: power electronics and sensing for robots powered by electrohydraulic artificial muscles, including high-voltage drivers, PCB design (Altium), sensing interfaces, and safety constraints. A complete example is Driver Electronics and PCB Design. I also built flexible PCB designs for joint sensing based on Hall-effect sensors in dexterous robotic hands.
- Control: nonlinear modeling, real-time C++ pipelines, and closed-loop hardware validation across classical and learning-based methods. Examples: Cascaded control architecture for a musculoskeletal robotic leg, Robust adaptive control for a continuum arm, data-driven control for musculoskeletal robotic joints (SSM), Kinematic redundancy resolution, Bio-inspired decoupled torque and stiffness control, and Adaptive fault-tolerant control.
Selected Results
- Bio-inspired musculoskeletal antagonistic joint: 58% higher strain than pouch-count-matched baselines (paper).
- Robust adaptive control of a continuum arm: 38% better tracking than inverse-dynamics baselines under payload variation (paper).
- SSM data-driven muscle control: 69% RMS tracking-error reduction versus feedback-only baseline (arXiv:2601.03247).
- Cascaded control of PELE (Musculoskeletal robotic leg): 500 Hz multithreaded C++ cascaded control, >5 Hz gait, up to 40% jump height, and cost of transport (COT) down to 0.73 (paper).
View Projects View Publications CV Contact LinkedIn Google Scholar GitHub
Projects

Adaptive Control of Soft Continuum Robots
First-author adaptive dynamic sliding mode control with 38% better tracking than inverse-dynamics baselines.
Read project · Paper
Bio-Inspired Musculoskeletal Antagonistic Joint
Actuator architecture, fabrication, and antagonistic integration with a measured 58% strain increase versus baseline.
Read project · Paper
Task control of redundant robots
Real-time generalized SNS framework with online hard joint and Cartesian constraints, validated in simulation and hardware.
Read project · Paper · Code
Driver Electronics and PCB Design
Driver architecture and PCB implementation in Altium for untethered electrohydraulic robotic platforms.
Read project · Paper
PELE Musculoskeletal Leg Control
End-to-end integration of compliant actuation, high-voltage drive, sensing, and 500 Hz real-time C++ control.
Read project · Paper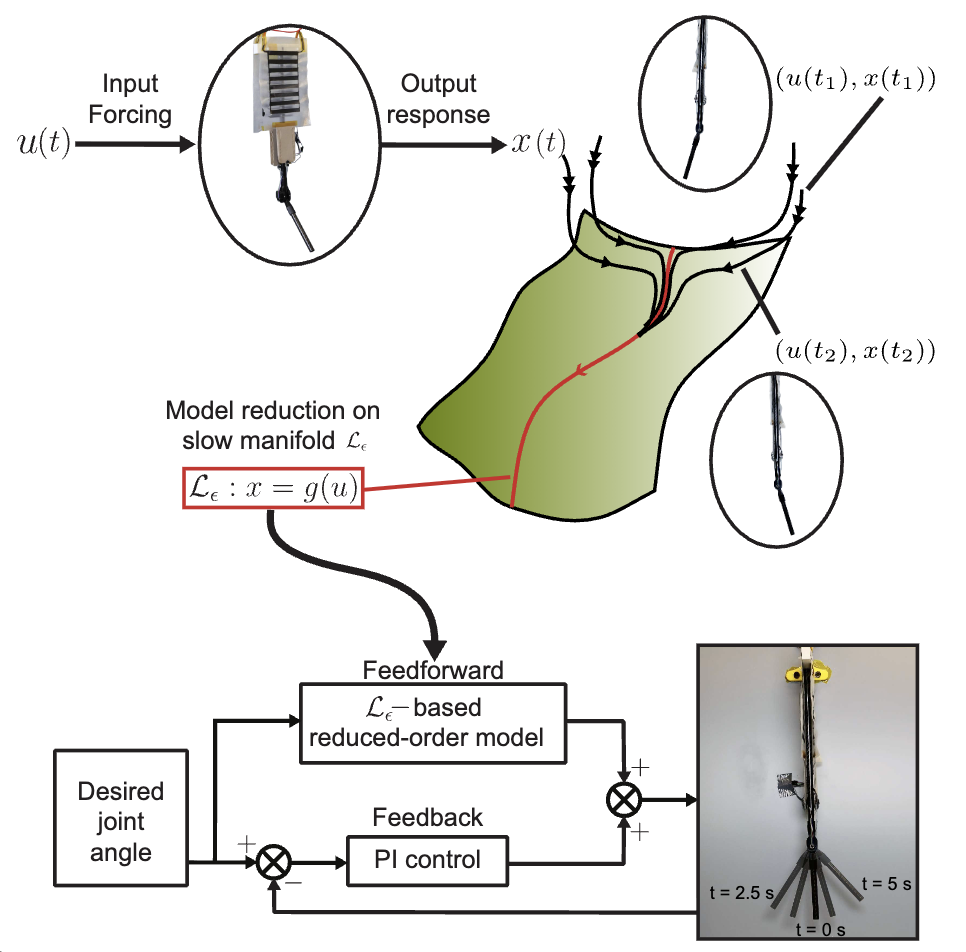
SSM Data-Driven Muscle Control
Co-first-author data-driven reduced-order control with 69% RMS tracking-error reduction versus feedback-only baseline.
Read project · arXivAll projects are shown above. Open any project card to see details, media, and paper links.