Bio-Inspired Musculoskeletal Antagonistic Joint
End-to-end actuator design, fabrication, and antagonistic joint integration for full motion range.
Outcome
I designed, built, and validated an antagonistic electrohydraulic muscle-clutch system that lets one muscle side contract while the opposite side can safely extend. This restores practical full-joint motion in musculoskeletal antagonistic joints. Compared with a matched HASEL-only baseline, the integrated system increased usable strain by about 58%.
Problem
Non-stretchable artificial muscles in antagonistic setups lose usable displacement because tendon slack blocks extension. In practice, this can significantly reduce functional joint range.
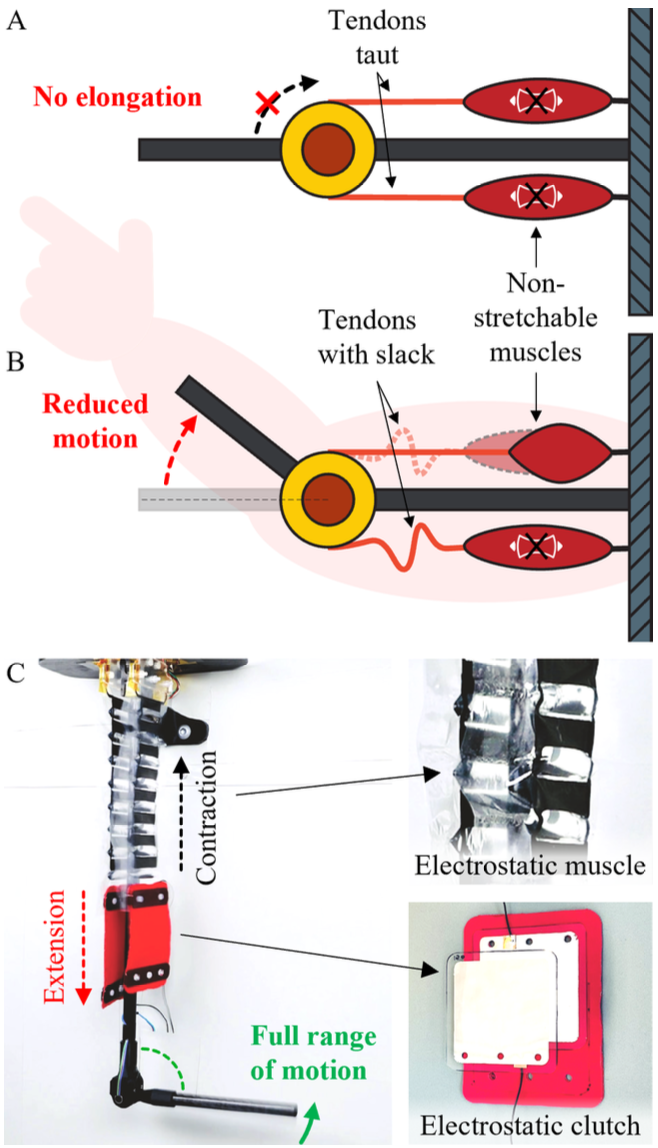
The goal of this project was to remove that bottleneck and enable both contraction and extension in one antagonistic architecture, while preserving fast actuation and controllable motion.
System
- Actuation: non-stretchable HASEL muscle packs (8 pouches in series) characterized up to 16.3 N force or 18.0 mm displacement at 8 kV
- Clutch layer: electrostatic clutch units integrated with elastic textile packaging (up to 5.5 N/cm^2 friction force density at 150 V)
- Joint integration: antagonistic tendon-driven musculoskeletal joint using paired HASEL-clutch units
- Control strategy: synchronized state-machine feed-forward control (clutch AC square-wave, HASEL ramp actuation)
- Instrumentation: high-voltage amplifiers, magnetic encoder, NI DAQ, and MATLAB data-acquisition control pipeline
Contribution
- Analytical modeling of antagonistic muscle-clutch mechanics for full-range operation
- End-to-end actuator and clutch design, fabrication workflow development, and build execution
- Joint-level integration, testbench setup, control implementation, and frequency-sweep experiments
Technical Stack
- HASEL actuator design and force-displacement characterization
- Electrostatic clutch design and stretchable packaging
- Antagonistic tendon-joint integration
- Feed-forward state-machine control for synchronized muscle-clutch actuation
- High-voltage actuation, sensing, and DAQ-based experimental control
- Hardware prototyping, benchmarking, and repeatability analysis
Key Results
- Increased antagonistic joint range from +-52 deg (HASEL-only) to +-82 deg with HASEL-clutch integration under matched input conditions (~58% gain in usable strain)
- Demonstrated smooth antagonistic switching and motion transitions up to 3.2 Hz
- Reached approximately 160 deg bidirectional joint range during 2.5 Hz cyclic operation
- Established an extensible architecture that can be transferred to other non-stretchable muscle technologies
- Published at IEEE ICRA (2025)
Media

Impact and Future Direction
This project addresses a core bottleneck in bio-inspired robotics: recovering full antagonistic joint motion when muscles are non-stretchable. The mechanism-level solution is modular and can be reused beyond HASELs, including with other non-stretchable muscle technologies such as McKibben-type actuators. Based on the paper’s conclusions, the next steps are heavier-load validation, horizontal testing without gravity-assisted return, and clutch-elasticity tuning for resonance-aware higher-speed motion.
Links
- Paper: IEEE ICRA 2025
Skills
actuator design electrostatic clutch fabrication antagonistic joints feed-forward control high-voltage robotics experimental validation system integration