Publications
Publications sorted by year.
Publications are listed below and sorted by year.
2026
2025
-
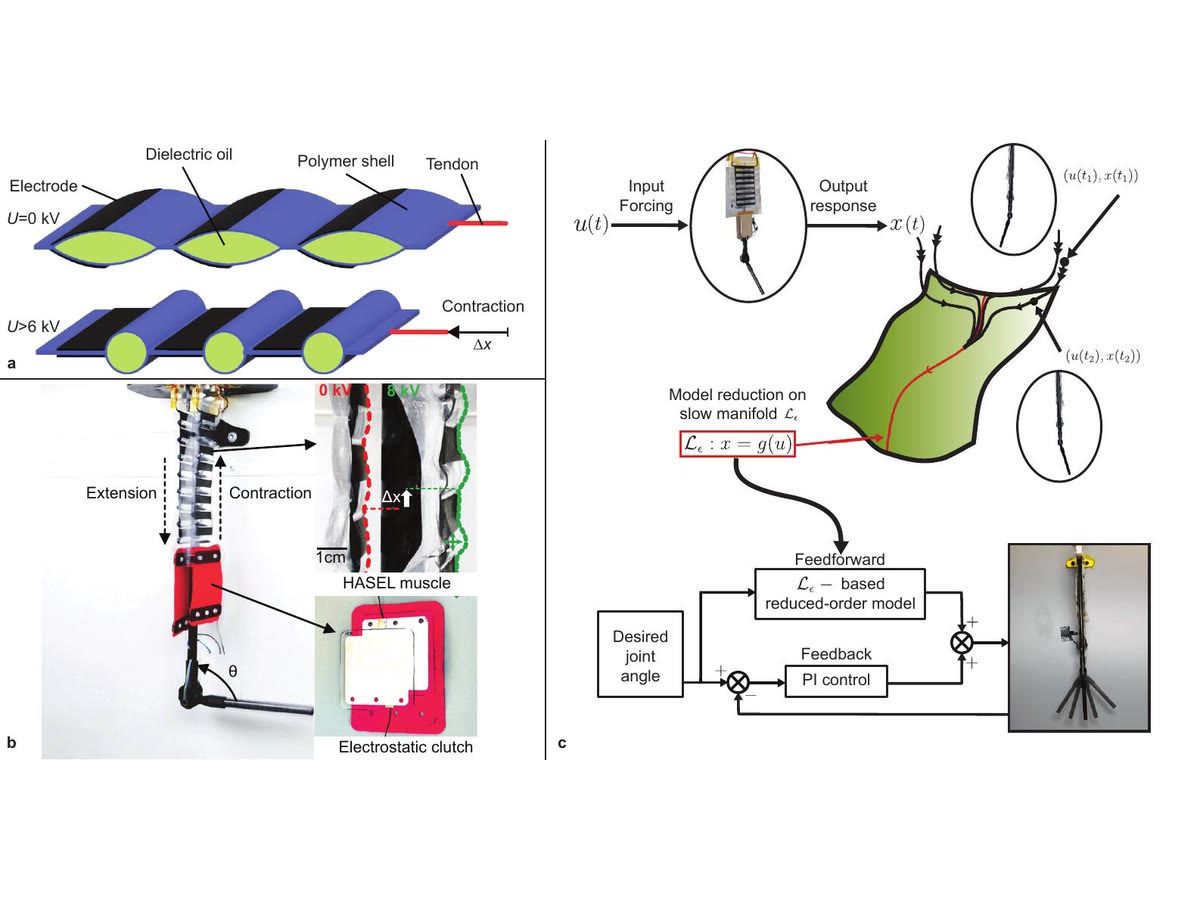
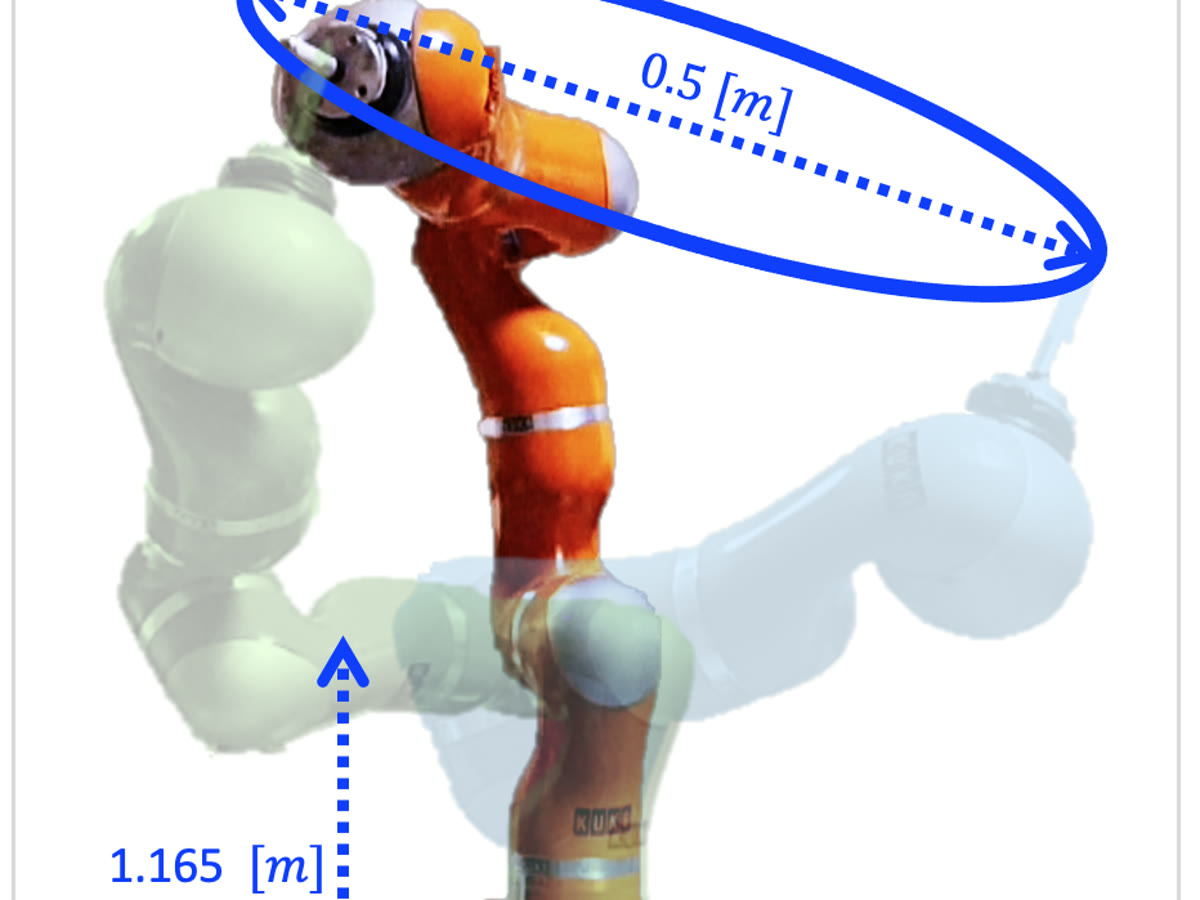
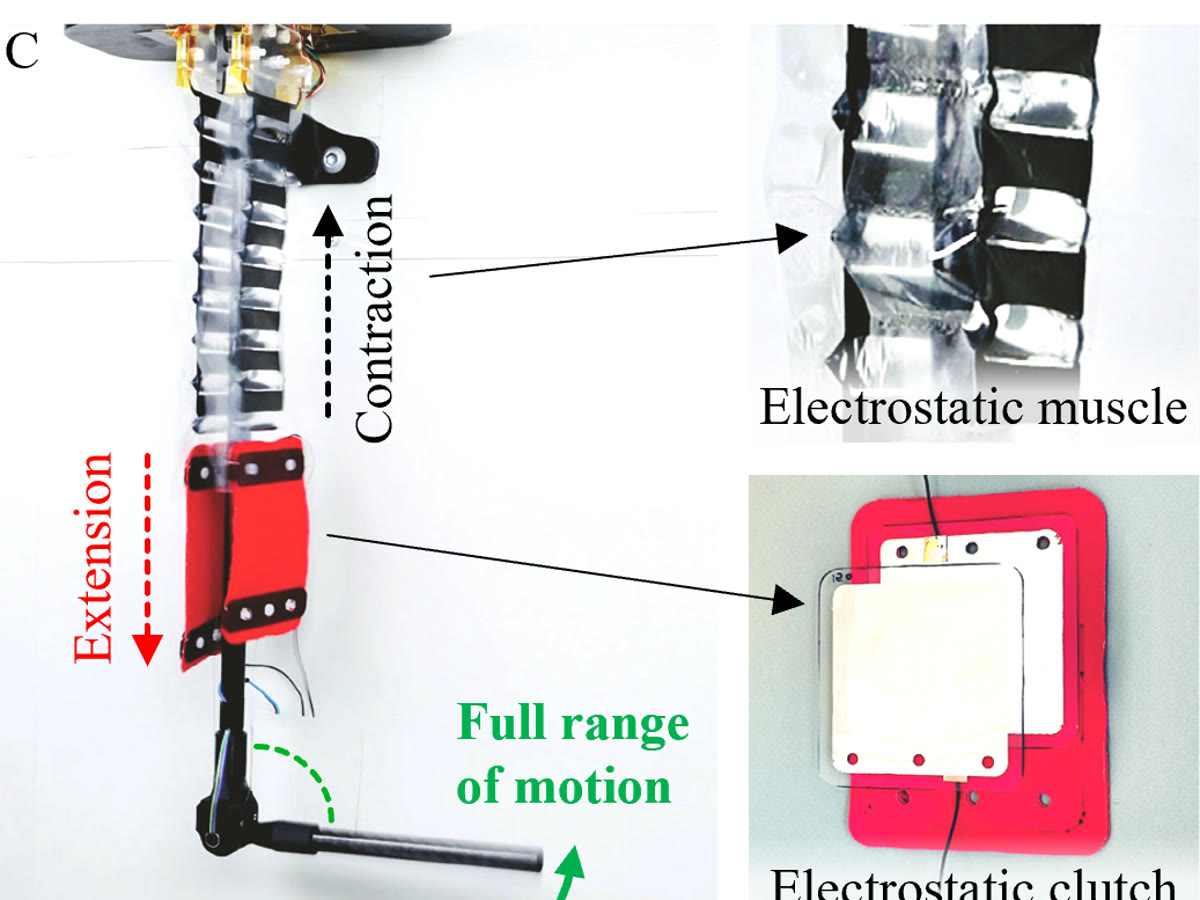 Stretchable electrohydraulic artificial muscle for full motion ranges in musculoskeletal antagonistic jointsIn IEEE International Conference on Robotics and Automation (ICRA)(Contribution: first author; stretchable actuator design, fabrication, and joint-level validation.) , 2025
Stretchable electrohydraulic artificial muscle for full motion ranges in musculoskeletal antagonistic jointsIn IEEE International Conference on Robotics and Automation (ICRA)(Contribution: first author; stretchable actuator design, fabrication, and joint-level validation.) , 2025
2024
-
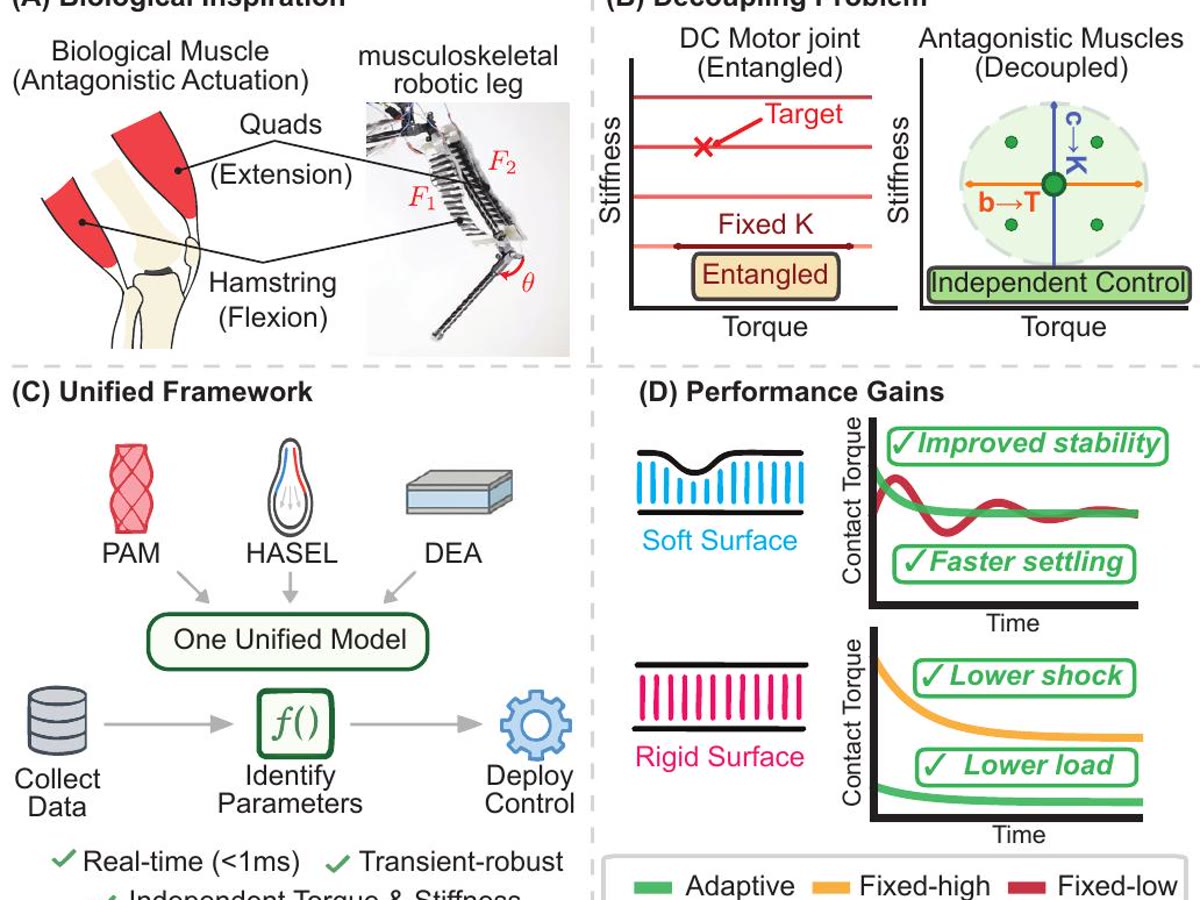
 Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotionNature Communications(Contribution: co-author focused on real-time control implementation.) , 2024
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotionNature Communications(Contribution: co-author focused on real-time control implementation.) , 2024 -
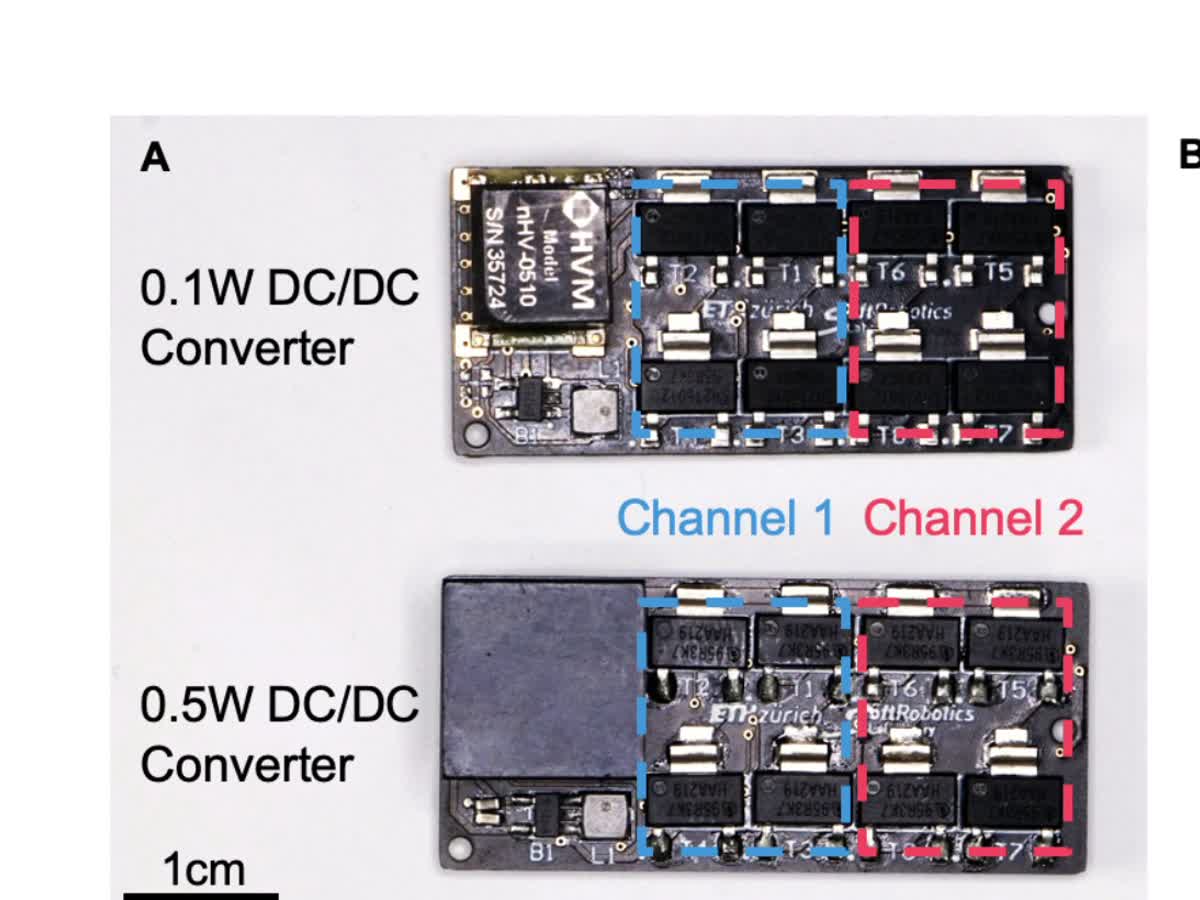 Low-voltage electrohydraulic actuators for untethered roboticsScience Advances(Contribution: co-author focused on high-voltage electronics and PCB implementation.) , 2024
Low-voltage electrohydraulic actuators for untethered roboticsScience Advances(Contribution: co-author focused on high-voltage electronics and PCB implementation.) , 2024 -
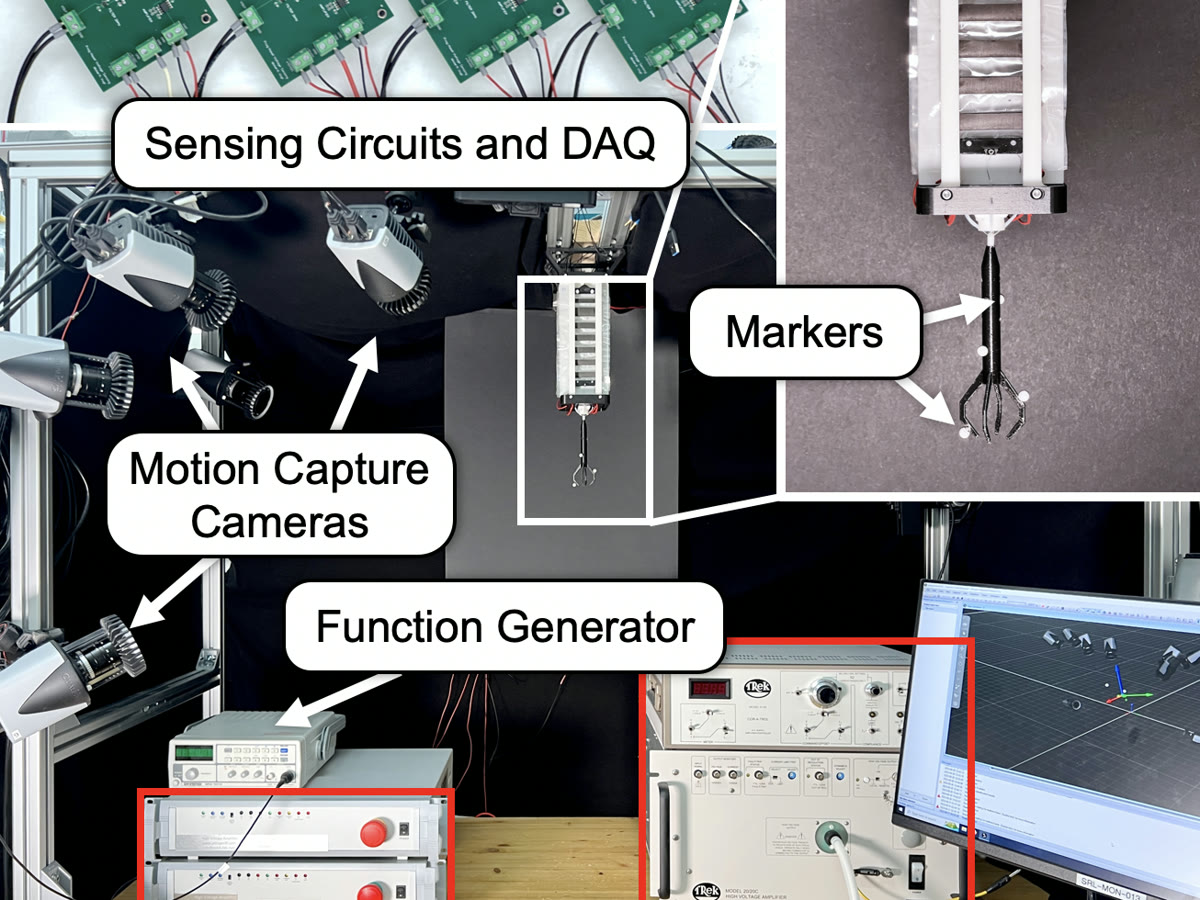 Self-sensing feedback control of an electrohydraulic robotic shoulderIn IEEE International Conference on Robotics and Automation (ICRA), 2024
Self-sensing feedback control of an electrohydraulic robotic shoulderIn IEEE International Conference on Robotics and Automation (ICRA), 2024
2022
-
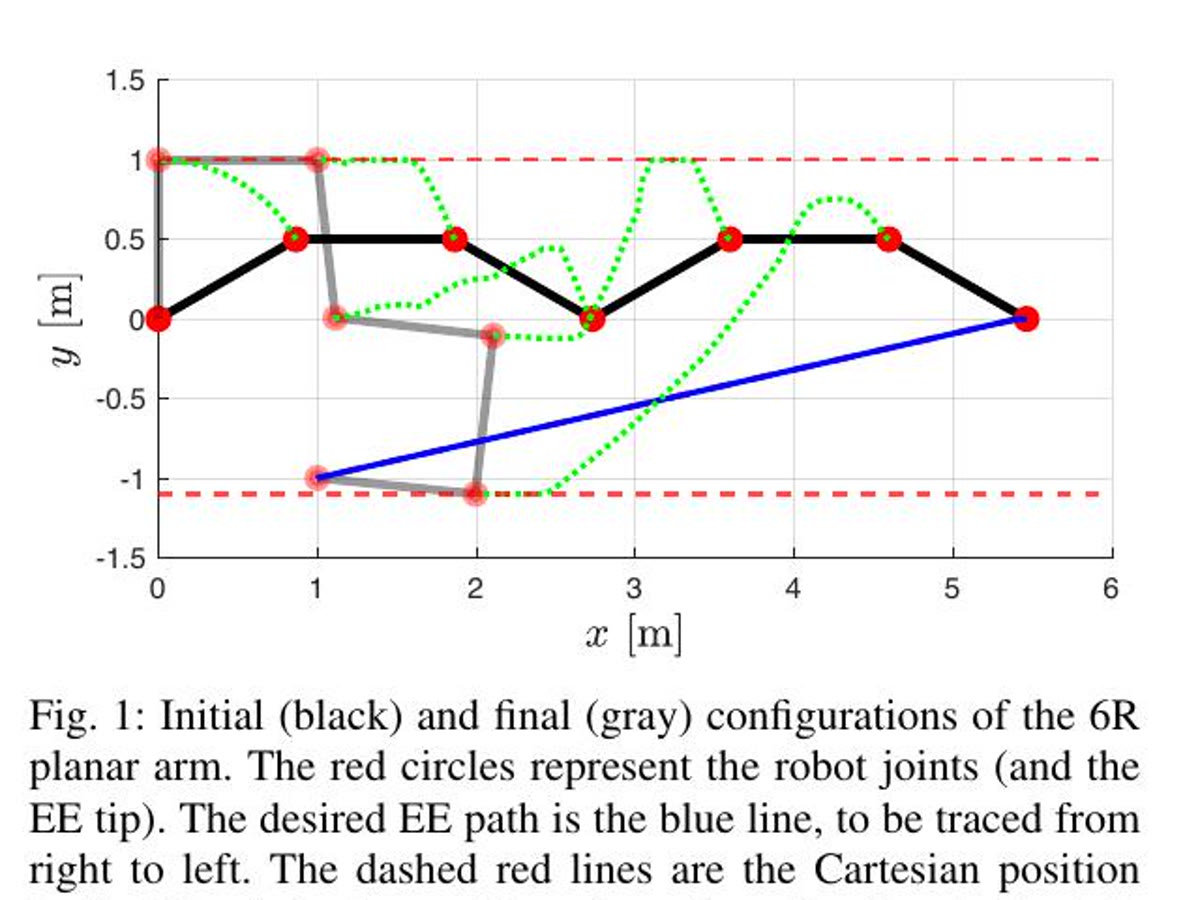
 Kinematic control of redundant robots with online handling of variable generalized hard constraintsIEEE Robotics and Automation Letters(Contribution: first author; real-time constrained kinematic control and hardware validation.) , 2022
Kinematic control of redundant robots with online handling of variable generalized hard constraintsIEEE Robotics and Automation Letters(Contribution: first author; real-time constrained kinematic control and hardware validation.) , 2022 -
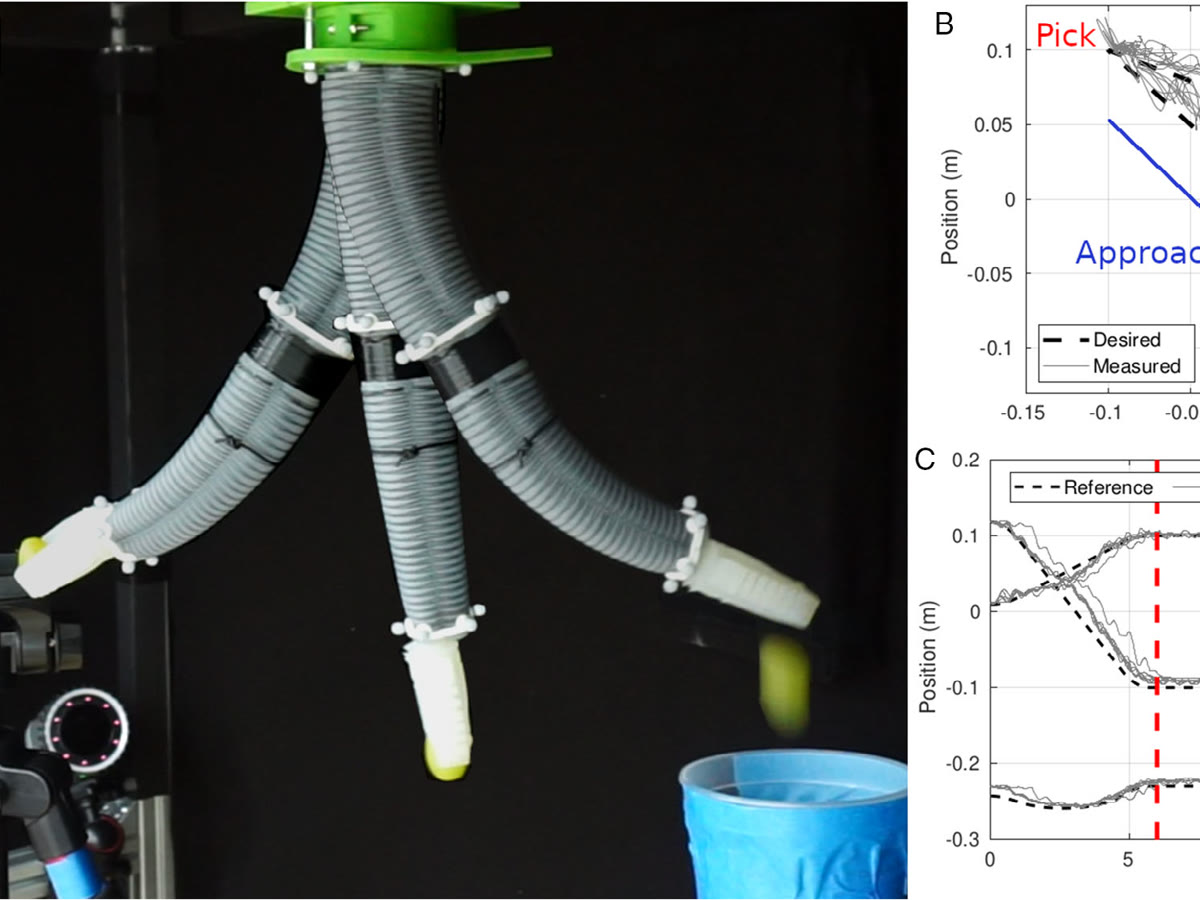 Dynamic task space control enables soft manipulators to perform real-world tasksAdvanced Intelligent Systems, 2022
Dynamic task space control enables soft manipulators to perform real-world tasksAdvanced Intelligent Systems, 2022 -
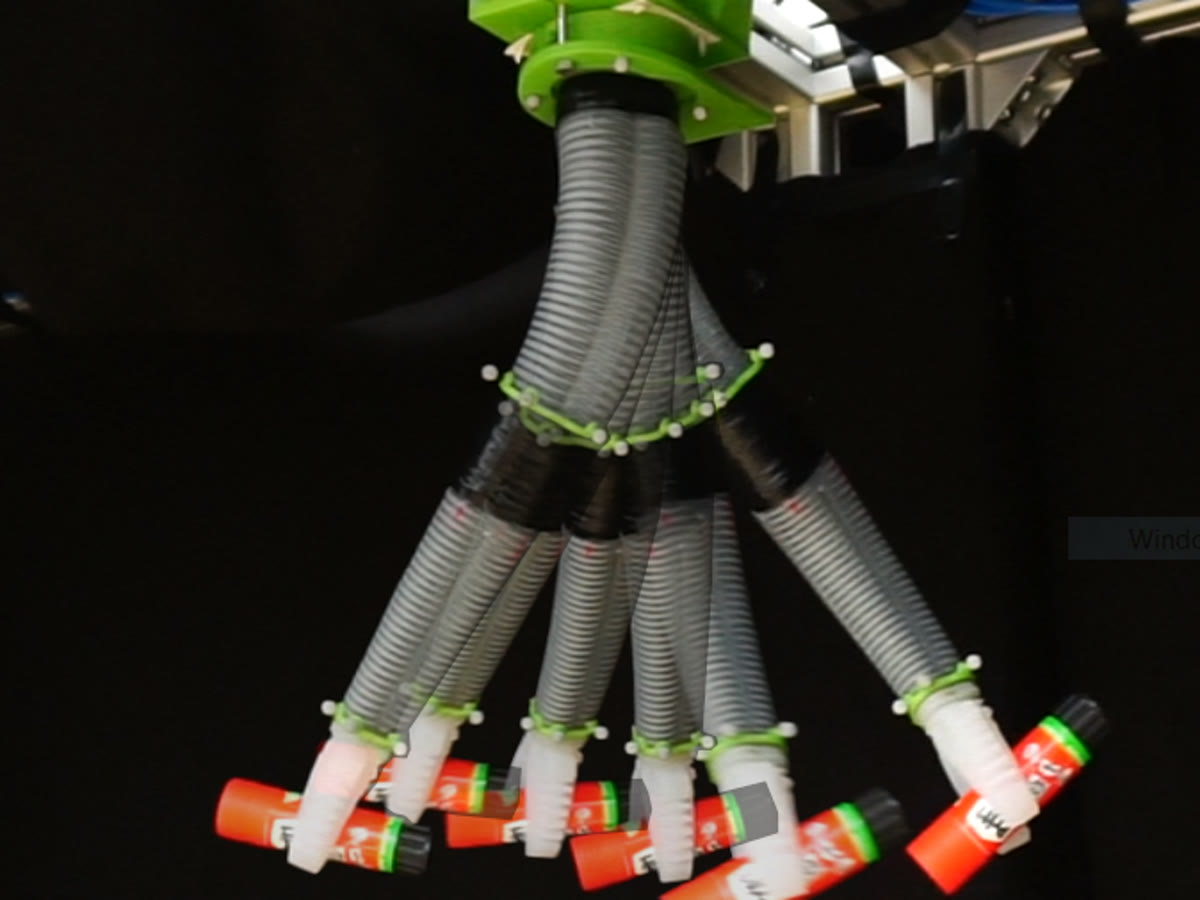 Adaptive dynamic sliding mode control of soft continuum manipulatorsIn IEEE International Conference on Robotics and Automation (ICRA), 2022
Adaptive dynamic sliding mode control of soft continuum manipulatorsIn IEEE International Conference on Robotics and Automation (ICRA), 2022
2021
2020
-
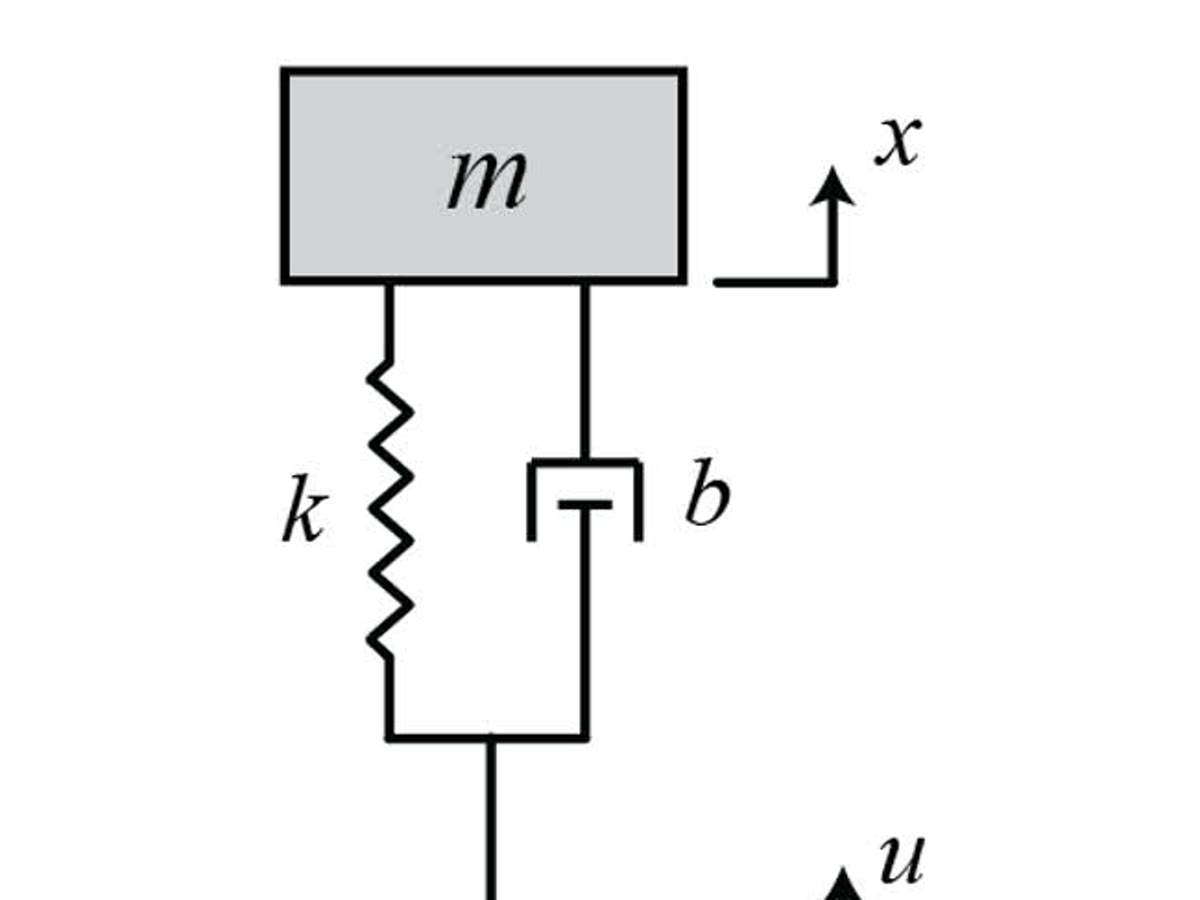 Adaptive fault-tolerant control for active suspension systems based on the terminal sliding mode approachProceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2020
Adaptive fault-tolerant control for active suspension systems based on the terminal sliding mode approachProceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2020